Post overview
- Background
- Setup
- Demo flight
Background
As a student in the university known as its great algriculture department, I understand how painful it is to manually collect data from the data loggers in the field. There could be hundreds of the data loggers in the large field four-hour driving away, so we port our UAV to do this specific job: flying across the field and hovering over the data loggers, downloading the data and uploading them to the cloud.
Setup
UAV setup
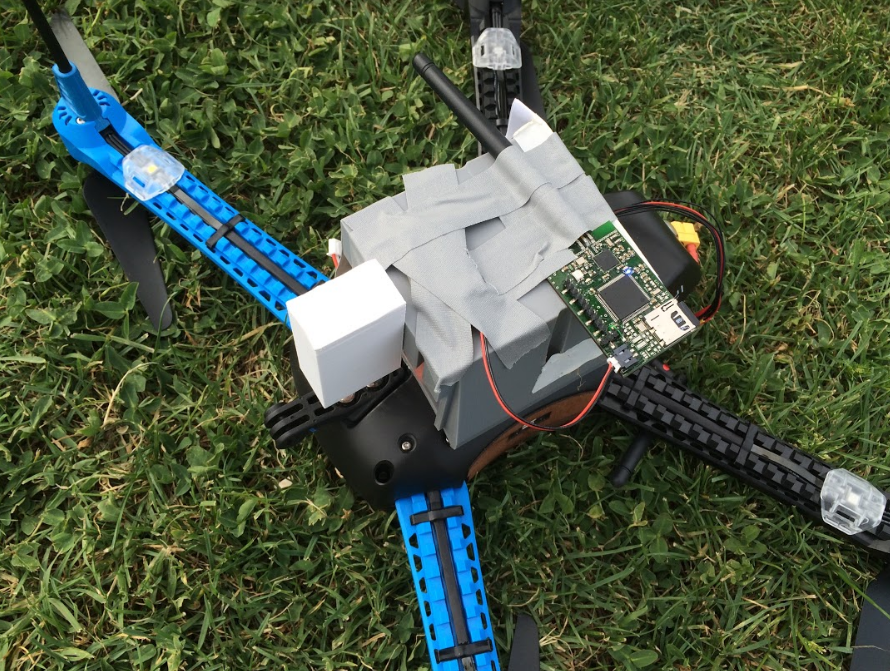
UAV platform
Our main UAV was crashed and have not been fixed, so we used 3DR Iris+ to do the demo.
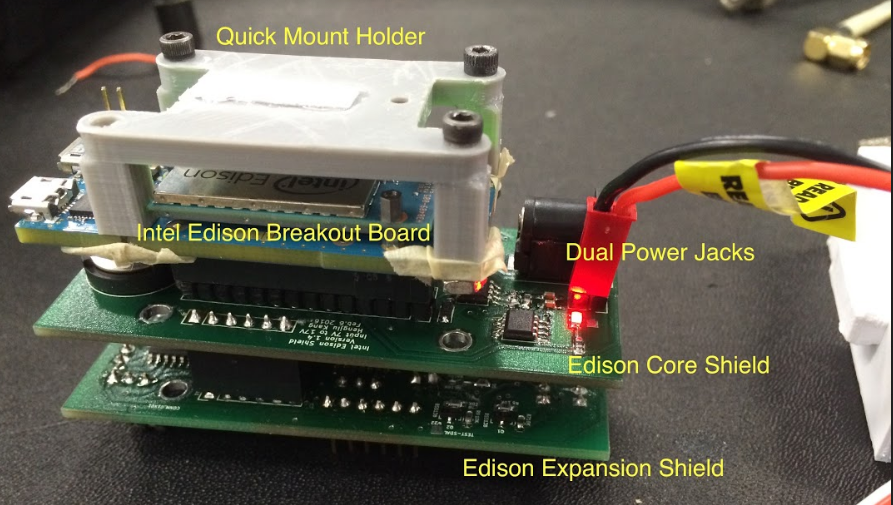
Companion computer
We chose Inel edison as companion computer, plus the customized interface board–Intel Edison Shield.
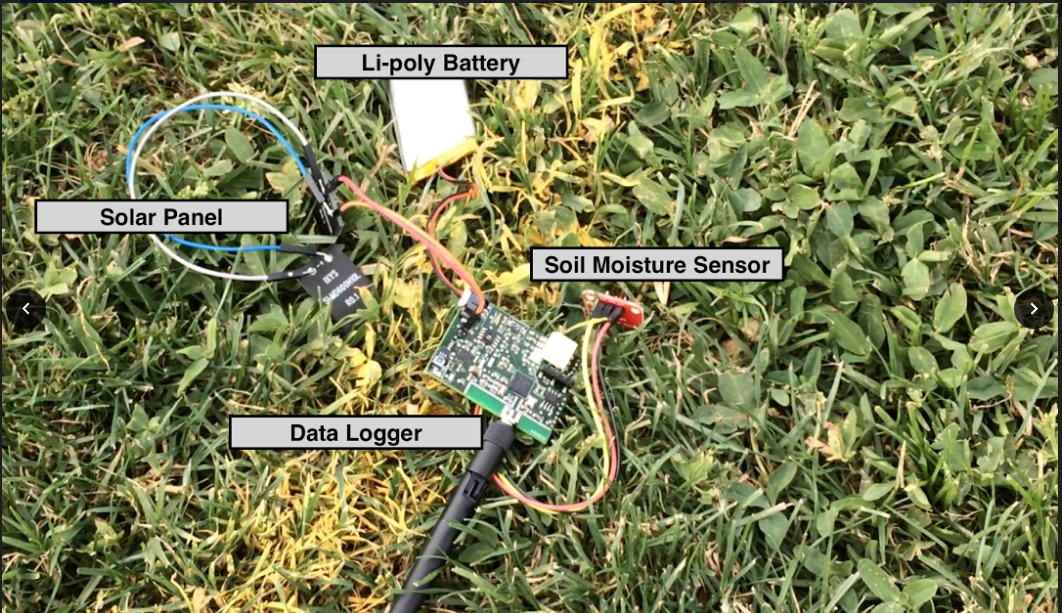
Ground data logger
Anther group of students designed this data logger based on PSoC 4 and BLE (Bluetooth Low Energy). This data logger will read humidity, temperature, luminance and moisture. It also has a SD card, so it will log data into SD card first, and upload logs when UAV is trying to collect data.
Payload: Data collector
In our system, UAV platform is only vehicle, and data collecting task will be done by mission payload – Data collector.
We did not have enough time to design extra mount points and racks to make job be gorgeous, but tape for quick and dirty.
Task plan
Task plan
This demo shows following steps in order:
- Taking off
- Flying to first data collecting position (10,0) and howering for 5 seconds
- Flying to second data collecting position (10,10), howering and ask payload data collector to collect data.
- Flying to third data collecting position (0,10) and howering for 5 seconds.
- Flying back to home position and landing.
We only have one data logger prepared, so we only collect data on the second point.
Task script
Our system uses Task script to describe the flight tasks.
TASK_LOCAL_GOTO 10 0 5 20
TASK_GRAB_DATA 5 10
TASK_LOCAL_GOTO 10 10 5 20
TASK_GRAB_DATA 5 10
TASK_LOCAL_GOTO 0 5 5 20
TASK_GRAB_DATA 5 10
TASK_LOCAL_GOTO 0 0 5 20
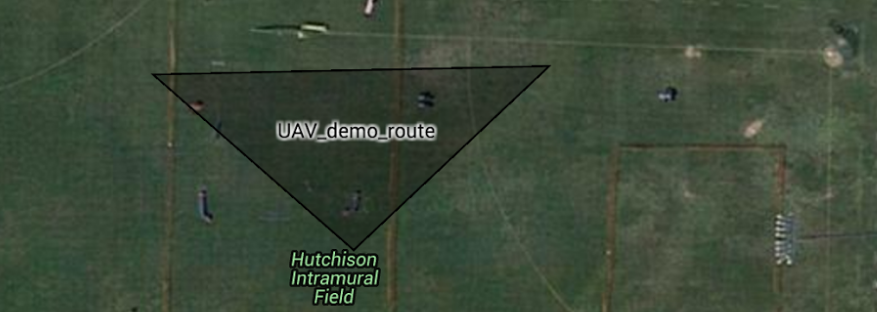
Map
Basically our UAV will follow a triangle trajectory as the following map:
