Post overview
- Basic idea
- Implementation
- Test
- What’s next
Basic idea
Our naughtyball’s positioning ability is based on Triangulation method, which is very similiar to our natural eyes: we are seeing an object from eyes, from two positions, and such a tiny difference can be recognized by our brains, then we will know how far the object is.
What is Triangulation method?
Based on geometry knowledge, we know that if we can know the length of one side and angles of coners both coners, we can calculate the distance between the third point to this side.
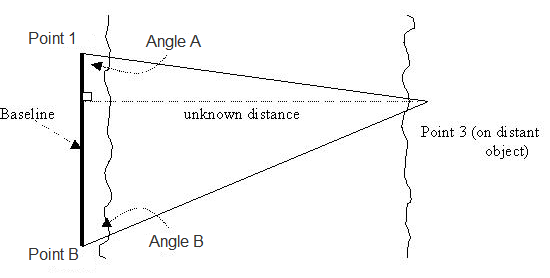
(Thanks to image source)
We will put at least two IR cameras in the ball. After two cameras return the positions which are different, we can calculate the actual distance by using Triangulation method. However, it can be problem for us to know angles directly, because we can only get positions on Cartesian coordinate system, so we need to figure out how to transfer a (x,y) position to (r, θ, φ) in Spherical coordinate system.
A short research
will be updated latter
Implementation
will be updated latter
Test
will be updated latter
What’s next
will be updated latter
License
Our Project: NaughtyBall has reached end of winter quarter 2015, but we will continually work on it until the day it become the one that we like.